
|

|
|

|

|

|

|

|

|
|

|

|
|

|
|
|

|

|

|

|

|

|

|

|
[Click on images to enlarge.]
[Movie demonstrating simple reactions to external stimuli.]
[Movie documenting Tribble at Artbots: the Robot Talent Show, 12-14 July 2003.]
[Distributed Sensor Networks as Sensate Skin, presented at the IEEE Sensors 2003 Conference, Toronto, Canada.]
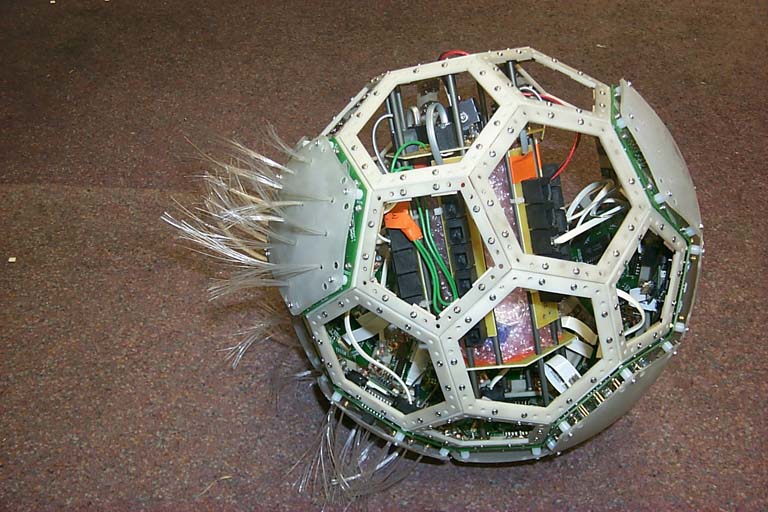
The Tribble project demonstrates the application of dense, distributed sensor networks to electronic skins. The Tribble is a one-foot diameter sphere covered in a sensate skin capable of multi-modal sensing (whiskers, pressure, light, sound, temperature) and actuation (glowing, purring, making sounds), all of which fall under distributed, local control of many patches of electronic skin.
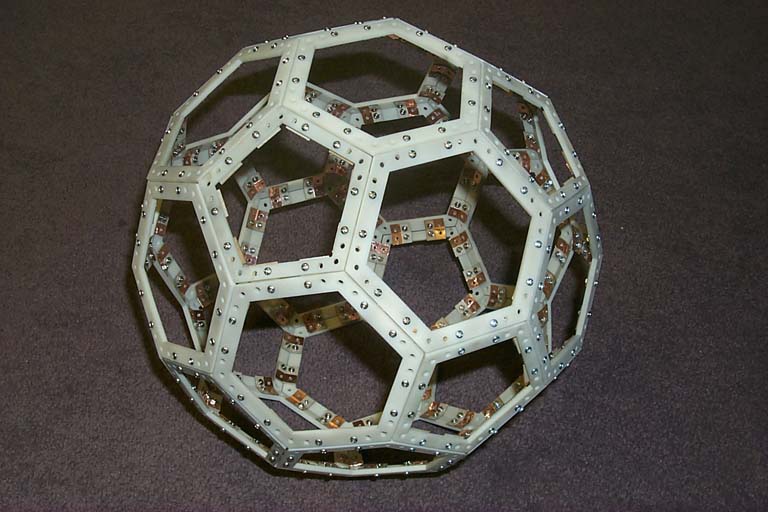
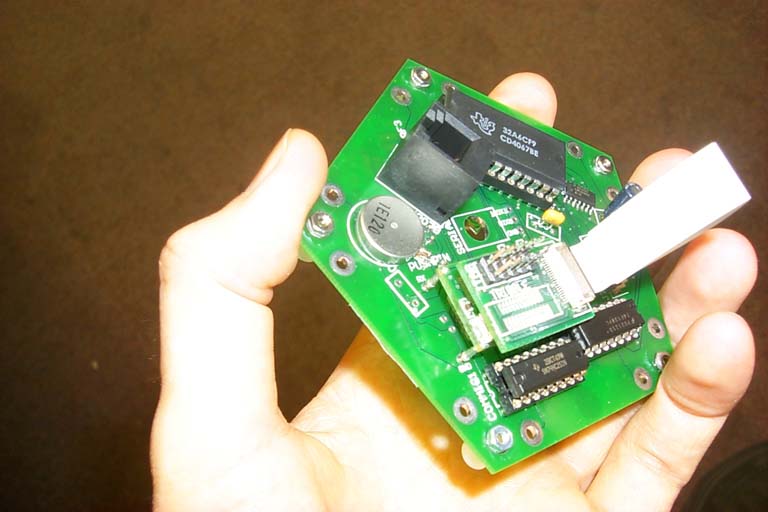
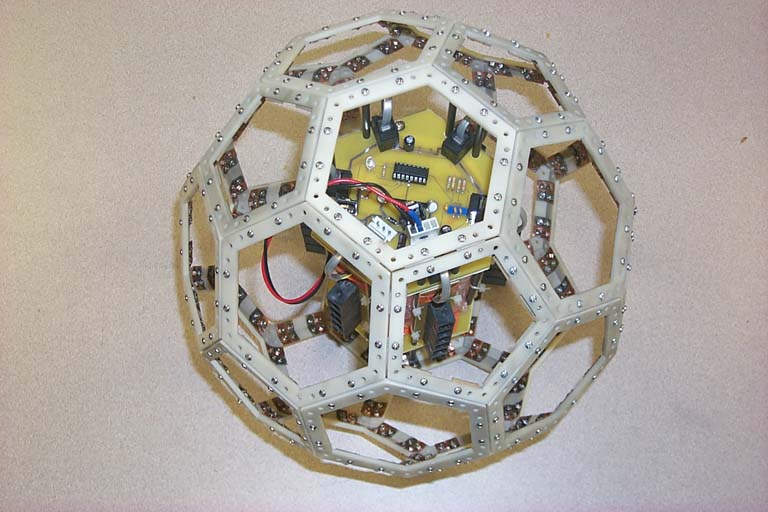
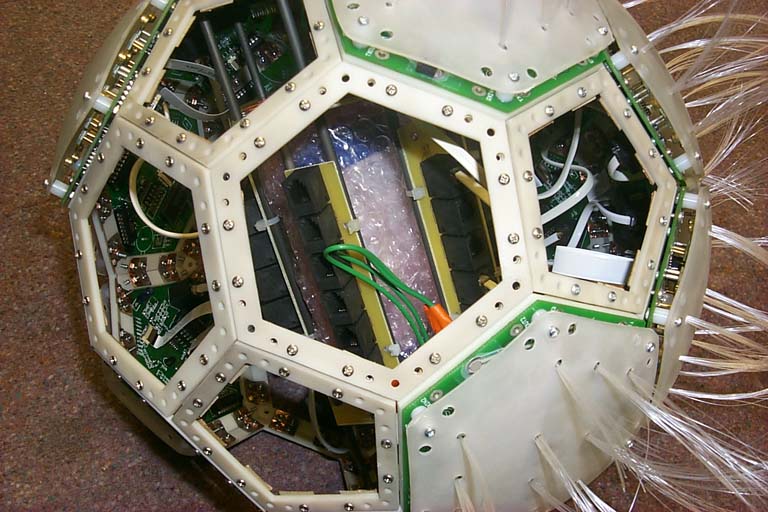
To the right are images of the Tribble in various stages of construction.
Near-term plans for the Tribble include developing distributed algorithms to differentiate between petting, poking, rolling, up, down, and a variety of other actions that can be performed with a large, hairy ball. The differentiation of these actions will be expressed by means of distributed actuation of sound, vibration, and light.
The physical frame of the Tribble is a truncated icosohedron - a soccer ball with flat sides. This 32-sided polyhedron (20 regular hexagons and 12 regular pentagons) is derived from a regular icosohedron (20-sided regular polyhedron the faces of which are equilateral triangles) by simply cutting off corners at regular intervals. Each facet of the frame, however, houses a curved sensing node panel such that the Tribble takes on a spherical shape overall.
At the center of the frame is suspended a battery pack and power regulation circuitry. Hexagon and pentagon shaped sensing nodes fit into the sides of the Tribble and connect to the central power supply with telephone jacks and cabling. The power infrastructure also carries with it a global communications bus that all sensing nodes are connected to for purposes of debugging and programming. In usual operation, the sensing nodes only communicate with their neighboring nodes, as defined by the geometry of the frame. In particular, a hexagon node has six neighbors and a pentagon node has five neighbors. The sensing node panels are attached to the frame with screws, two per edge of the panel (12 for hexagons, 10 for pentagons). Aside from holding the panel in place, these screws also make an electrical connection with adjacent panels to allow neighbor to neighbor communication. There is no centralized control unit.
Each sensing node panel is equipped with three pressure sensors, a temperature sensor, a light intensity sensor, a microphone, and a number of whisker sensors. Hexagon panels and pentagon panels are essentially identical save for the number of neighbors they are equipped to communicate with and the number of protruding whisker sensors; hexagons have 12 whisker sensors whereas pentagons have seven. Each sensor channel is sampled by an onboard 8-bit microprocessor (a Pushpin processing module) at approximately 1kHz with approximately 10 bits of resolution per sample. All told, the Tribble as a whole takes in 516 channels of sensory input, which adds up to about 5Mbits/second of sensory bandwidth. The same onboard processing module also handles all communication tasks for a panel.
In addition to sensing, each panel can actuate a small vibrating pager motor, a RGB LED, and a small speaker. Many methods of Tribble locomotion have been considered, but all remain unimplemented.