Boxie: The Interactive Story-Capture Camera
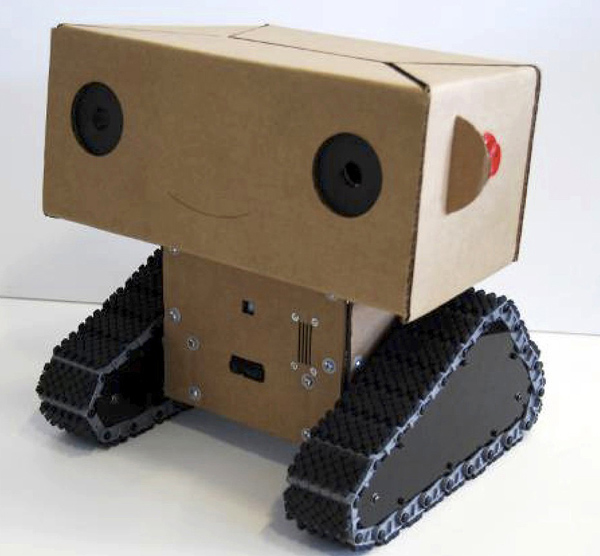
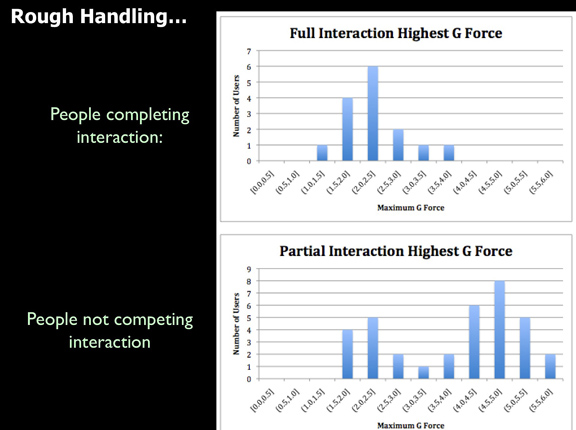
We have developed a compact mobile robot equipped with a fleet of basic sensors, media recording capability, and audio output capability to work as something of a mobile reporter. 'Boxie' the robot was designed to get 'stuck' (the least challenging part of this project) and ask for help when it sensed people nearby - a 'cute' voice, appearance and demeanor were designed to encourage human engagement. Boxie would then engage people in a structured dialog, thereby producing something like a digitally annotated interview. A filmmaker can then take Boxie's clips and easily put them together to craft a story about the place in which Boxie was set loose. Boxie logged data from an array of embedded sensors, including an accelerometer, which indicated how 'roughly' the robot was treated. This plot, from Alex's thesis, shows that people who didn't complete the interview process were significantly 'rougher' - perhaps indicating traits of emergent human-robot violence (or just rash impatience - is there a difference?).
{kind=link}
Link here for a short video clip showing a video derived from Boxie roving the Media Lab. No advance notice was given when Boxie was released - people didn't know what he did or was there for. Link here for a longer video clip derived from the same sessions.
Link here for a 2011 Media Lab documentary about Boxie.
Boxie has stimulated a myriad of popular press articles - the first was in the New Scientist and another in the Atlantic Monthly.
Boxie is technically summarized in our 2011 ACM Multimedia paper:
A Mobile Interactive Robot for Gathering Structured Social Video, Reben, A. and Paradiso, J.A., in Proceedings of ACM Multimedia '11, Scottsdale, Arizona, 2011.
Link below for Alex Reben's MS Thesis detailing the Boxie Project:
Alexander Reben -- Interactive Physical Agents for Story Gathering (MS) June 2010.
Boxie was related to Mat Laibowitz's Spinner project, which also dealt with sensor-based video editing, but did not use interactive or mobile agents.
Boxie continues as an active project that Alex Reben has been independently developing since graduating from the MIT Media Lab - see Alex's website for details.
The original Boxie has been donated to the MIT Museum.
![]()