People Publications Introduction Inspiration Software Hardware See the nodes in Action!
HARDWARE SYSTEM
Hardware systems were designed to support different types of parasitic mobility:
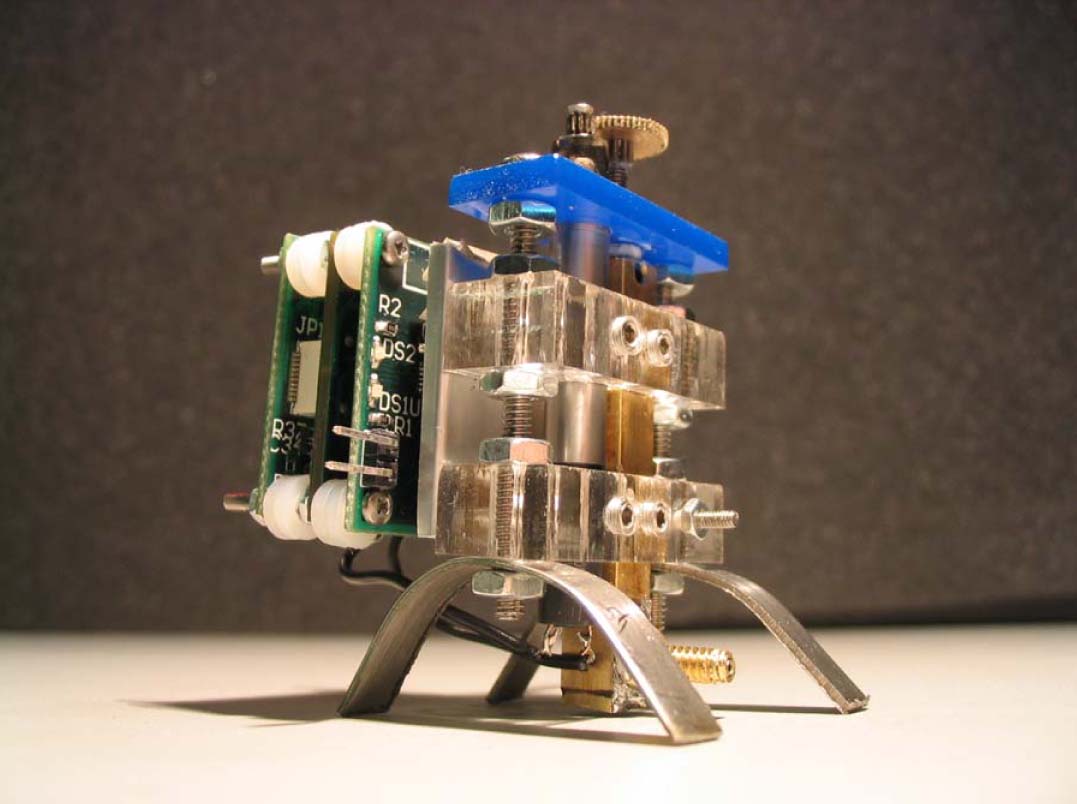
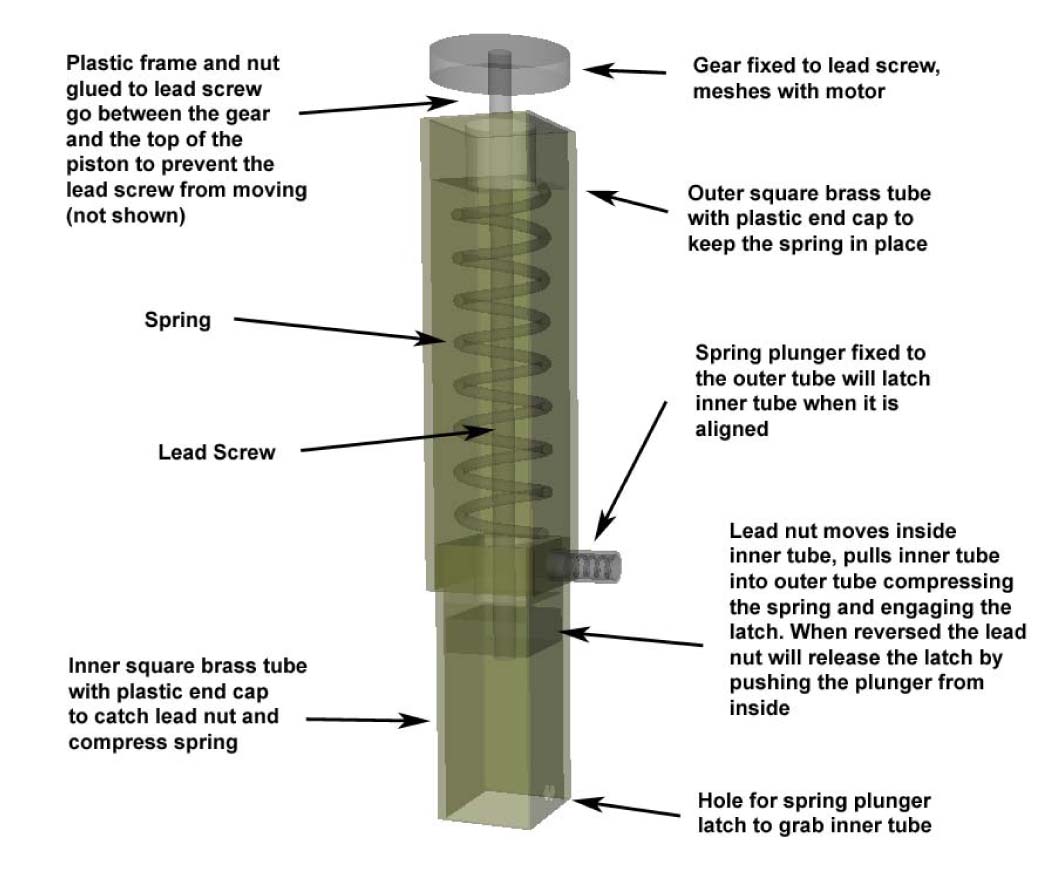
1) Active Node Design based on the natural behaviors of fleas and ticks. This hopping robot can sense a nearby object, hop at it or onto it, and attach. It is 40mm tall x 30mm wide x 30mm deep and contains a hopping piston and a planetary-geared motor.
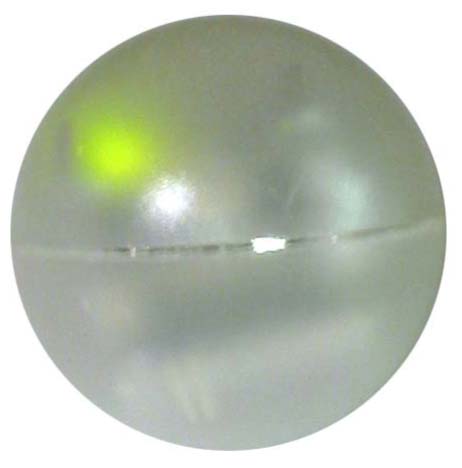
2) Semi-Passive and Passive Node Design: These nodes have semi-passive and fully passive attachment/detachment mechanisms. The electronics were enclosed in a plastic sphere (diameter= 2in.) For semi-passive nodes, the surface is coated with a polyester double-sided adhesive tape. For the passive nodes, a silicone adhesive is used.